1.3 Target Acquisition and Tracking
An FGS astrometry dataset contains all the steps in the target acquisition and tracking sequence. This information is necessary because the calibration pipeline uses it in the data reduction process. In this section we describe the acquisition and tracking sequence and define the flags and status bits that record the activities during the acquisition.
The first step in using an FGS either as a guider or an astrometer is to acquire the target in its instantaneous field of view. To accomplish this task, the 486 slews the FGS’s IFOV to the expected position of the target within its pickle. (Uplinked commands specify the SSA and SSB rotation angles that should put the IFOV on the star.) Once the IFOV arrives at the expected position of the star, the 486 delegates control of the FGS to its FGE, which attempts to locate and to track the star by implementing its Search, CoarseTrack, and FineLock algorithms.
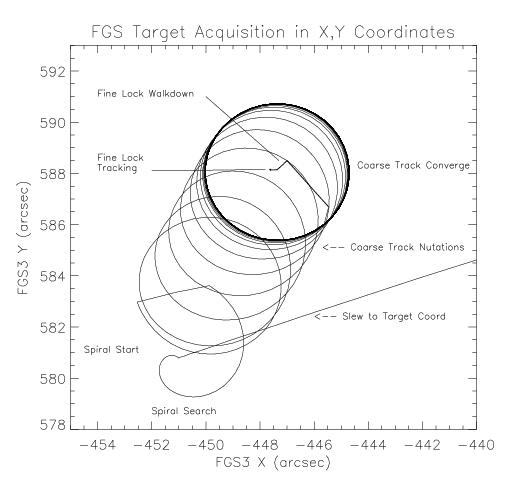
Figure 1.4 illustrates the movement of the IFOV during a target acquisition, showing:
- The end of the slew to the target's expected location.
- A short spiral search.
- Coarse track nutations to locate the photocenter.
- WalkDown to locate interferometric null.
- Tracking of the star in FineLock.
This particular case was chosen for its clear demonstration of the phases of the acquisition. It is, however, atypical because the 7" difference between the expected location and the true location of the target is unusually large.
1.3.1 Search
The IFOV, under FGE control, steps every 25 msec along an outward spiral while the PMTs count the photons received from the 5” × 5” patch of sky in the IFOV over the same 25 msec. When the counts fall within a specified range, the FGE declares the spiral search a success, and the instrument proceeds to the next phase of the acquisition, CoarseTrack. Otherwise, the FGE continues the spiral search until it either finds the star or completes it maximum search radius, typically 15” for astrometry and 90” for guiding. If no star is detected, the attempt is classified a failure, and the FGE halts further activity.
1.3.2 CoarseTrack
Having successfully completed its SEARCH, the FGE then attempts to acquire and track the star in CoarseTrack. In this mode the FGS determines the photocenter of light by comparing the photon counts from the 4 PMTs as the IFOV nutates in a 5” diameter circular path around the target. Data from each nutation are used to verify that the star is still in view and to adjust the path of the next nutation to improve the centering of the star. If the FGS is being operated as an astrometer in Position Mode, the FGE will initiate the FineLock acquisition after a specified number of nutations: 13 for bright, mv<14 objects, 21 for fainter objects. If the FGS is being operated as a guider or as an astrometer in Transfer Mode, it remains in CoarseTrack until instructed by the 486 to initiate an attempt at FineLock.
If the PMT data ever indicate that the star is no longer present, the FGS reverts back to SEARCH mode, beginning where it left off on the search spiral to resume its outward search for the star.
1.3.3 FineLock
Upon completion of the CoarseTrack, either autonomously or by order of the 486, the FGE assumes control of the FGS and attempts to acquire the target in FineLock. This activity involves two distinct phases, acquisition and tracking. Both make use of the interferometric signal (the S-curve) to achieve success. The fundamental interval of time during FineLock is the fine error averaging time denoted as FESTIME. During an FESTIME the FGS integrates the PMT data while holding the IFOV fixed.
This acquisition phase is called “WalkDown to FineLock,” or simply the WalkDown. The FGE commands the FGS’s IFOV to a position offset or “backed-off” from the photocenter (determined by CoarseTrack). The back-off distance, equal in (+dx,+dy), is specified by the uplinked command parameter KB:

Once the IFOV arrives at the starting point, its position is held fixed for 0.4 SECONDS or an FESTIME, whichever is longer. The FGE collects data from the 2 PMTs on each of the x and y channels to compute an average sum (SUM) and difference (DIFF) on each channel. The DIFF and SUM values compensate for any difference in the response of the two PMTs on a given axis. Thus, the x-axis fine error signal (FES) for the remainder of a Position Mode observation will be:
Qx = (Ax – Bx – DIFFx) / SUMx
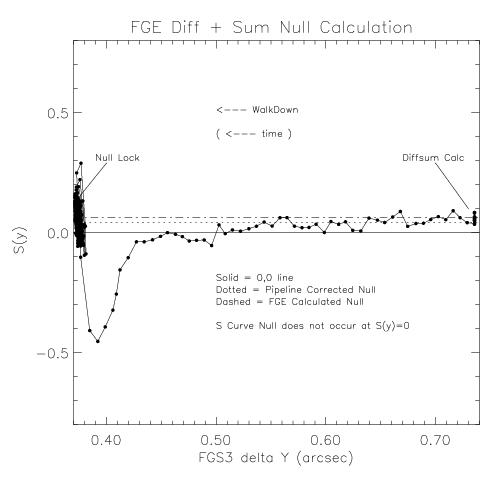
where Ax and Bx are the average photon counts/25msec (from PMTXA and PMTXB) integrated over the FESTIME, and DIFFx and SUMx are the average difference and sum of the PMTXA, PMTXB counts/25msec (determined while the IFOV was held fixed at the starting point of the WALKDOWN). The y-axis FES is computed in a similar fashion. Figure 1.5 shows the instantaneous value of the normalized difference of the PMT counts along the y-axis during a WalkDown to FineLock. The fact that the null lies to the positive side of Sy = 0.0 clearly demonstrates the need for the DIFF-SUM adjustment to locate the true interferometric null (where Qy = 0).
During the WalkDown the IFOV creeps towards the photocenter in a series of equal steps, approximately 0.006” in x and y, and is held fixed for an FESTIME while the PMT data are integrated to compute the fine error signal on each axis. If the absolute value of the fine error signal for a given axis exceeds a command specified threshold for three consecutive steps, satisfying the 3-hit algorithm, the FGE concludes that it has encountered the S-curve on that axis. From this point on, a continuous feedback loop between the star selector servos and the value of the fine error signal governs the repositioning of the IFOV along that axis from this point on. The FGS continuously adjusts the star selector positions by small rotations after every FESTIME interval to set the fine error signal to zero, repositioning the IFOV so that the wavefront presented to the face of the Koesters prism has zero tilt.
The FGS tracks the star in FineLock by keeping the IFOV loitering about the star’s interferometric null (the zero-point crossing of the fine error signal). Once the S-curve has been encountered on, say, the x-axis, the correction to the current position of the IFOV along the x-axis for the next FESTIME is computed by
dx = K1x * Qx + K0x
where K1x and K0x are uplinked command parameters called K-factors.
When the S-curves on both axes have been encountered and have satisfied the 3-hit algorithm, the FGS is said to be tracking the object in FineLock and the FGE sets the DataValid status flag. Until recently, misalignments within the FGS caused the y-xis S-curve to be detected before the x-axis S-curve, yielding a 0.3 arcsec difference between apparent positions of the x- and y-axis interferometric nulls. Commanding changes uploaded to HST in 2001 have since remedied this problem.
1.3.4 Transfer Scans
The acquisition of an object for an FGS operating in Transfer Mode is carried out in the same sequence described above, with the exception that the FGS remains in CoarseTrack until a specified spacecraft time. Thereafter it proceeds to FineLock by slewing the IFOV to the starting point of the first scan. As described earlier for the Position Mode WalkDown, the FGS averages and differences the PMT data for 0.4 seconds, computes the fine error signal, and compares it to a commanded threshold. However, this threshold equals zero for Transfer Mode observations, immediately prompting the FGE to declare that FineLock has been achieved and to set the DataValid flag. Setting this flag signals the 486 that the FGS is ready to begin the Transfer Mode observation.
In a Transfer Mode observation the 486 computer steps the FGS's IFOV across the photocenter (determined by CoarseTrack) along a diagonal path in detector space for a distance specified in the original proposal. Each sweep across the target is referred to as a scan. After the completion of a given scan, the IFOV reverses direction and scans the object again until the total number of scans specified in the proposal have been completed. Every 25 msec the PMT data and star selector rotation angles are reported in the telemetry. The FGS samples the entire S-curve, which can be reconstructed by post observation data processing.